![]() トップ >CG_TIPSメニュー >現ページ
トップ >CG_TIPSメニュー >現ページ
このコーナーは、"Light Wave 3D"限定のヒント用にオープンしました。
僕も長年 Light Wave ユーザーですが、他の3DCGソフトと比べて、情報はホントに少ないです。
日本語表記はとても少なく、ググって出てくる情報はほとんど英語を初めとする外国語の情報ばかりです。
そんな状況なので、LightWaveに関する情報を求めている方々は多いのではないかと思い、
日本の"LightWave 3D"ユーザーのためにこのコーナーを設けました。
とは言っても、私はCG専門学校講師でもないし、そうそう暇でもないので、手取り足取りの詳細リファレンスは作れませんので、
制作のキーポイントのみ記載します。細かい点は、色々試行錯誤で探ってくださいませ。
<自転車のペダルを脚でこぐIK設定>
IK(インバースキネマティクス)で、自転車のペダルをこぐアニメを作成します。(→[IKとは?]を見る)。
クルクルを回転するペダルに脚を追従させるので、歩くIK設定より難しく思われるかもしれませんが、基本は歩行と同じです。
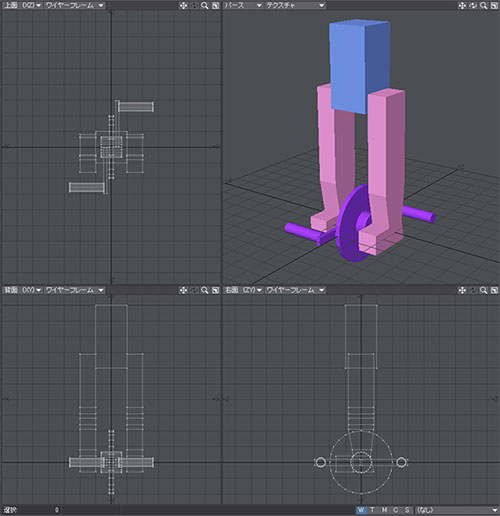
Ⅰ.ペダルと脚を簡易モデリング
さて、原理を学ぶためなので、簡単なオブジェクトを作成します。ペダルと胴体と脚のモデリングを別レイヤーで行います。
右脚と左脚には、それぞれウェイト設定をしておきます。
Ⅱ.脚にボーンを設定&ペダルにNullを親子設定
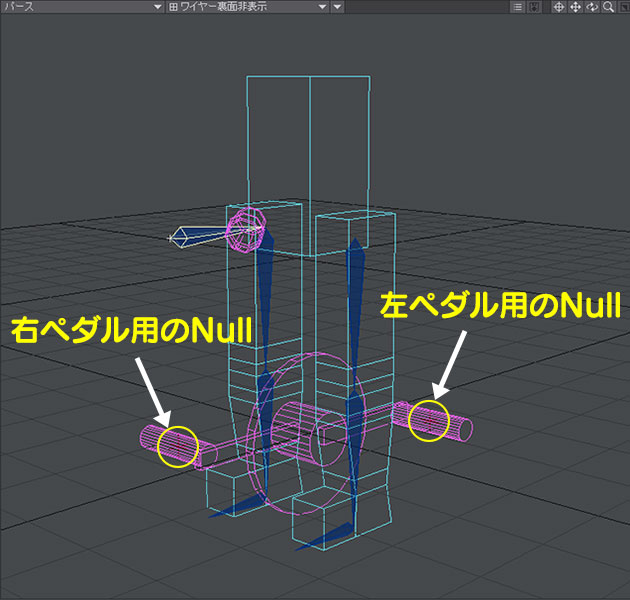
右脚と左脚それぞれに、ボーンを設定します。(⇒「ボーンの設定について」はこちら!)
通常、私は脚から足先まで6本以上のボーンを設定しますが、今回は解説用に分かりやすく3本に設定しています。
ペダル用のNullオブジェクトを2つ追加します。右ペダル用と左ペダル用、それぞれのNullです。
Nullの名前は、Null_right、Null_leftとか分かりやすく付けておけば良いでしょう。今回、私は単純にRとLにしました。
右用のNullは右ペダルの位置に、左用のNullは左ペダルの位置に移動します。
このNullオブジェクトが、脚のボーンのゴールオブジェクトとなります。
Ⅲ.脚のIK設定
次にIK設定を行います。
脚のボーンのそれぞれのピッチ角度を、ペダルに足が載るような角度にざっくりと回転させておくと良いでしょう。
「セットアップ」から、モーションの「モーションオプション」を開きます。
「モーションオプション」内の「IKとモディファイア」タグを開き、設定を施していきます。
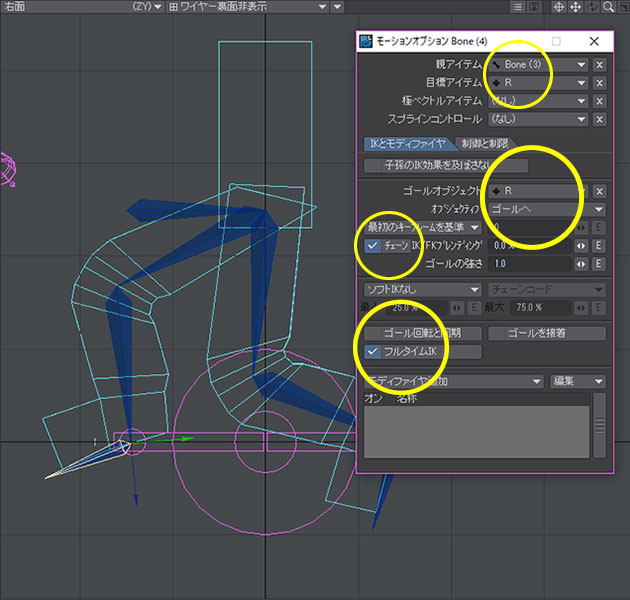
それぞれのボーンのゴールオブジェクトを、次のボーンに設定します。
「チェーン」と「フルタイムIK」も忘れずにチェックします。
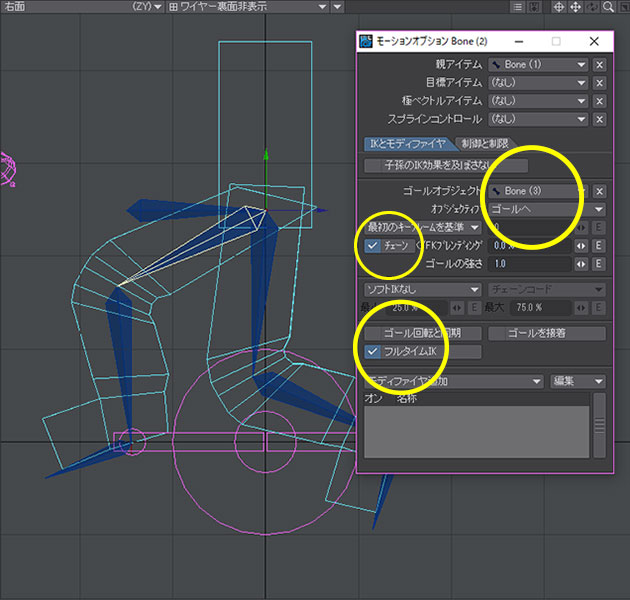
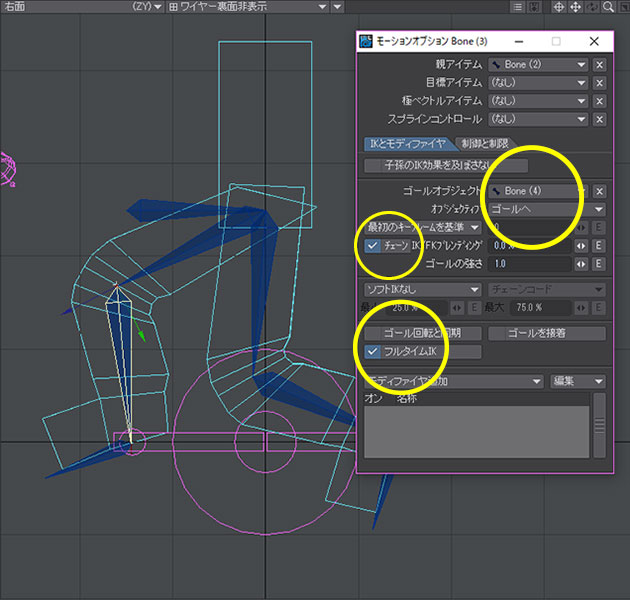
最後の足先となるボーンは、「目標」も「ゴールオブジェクト」も、ペダルのNullオブジェクトとなります。
右足の最終ボーンはペダルの右Nullへ、左足の最終ボーンはペダルの左Nullへ。
これらの最終ボーンそれぞれが、常にNullオブジェクトを追従します。
Ⅳ.ピッチ角度の制限
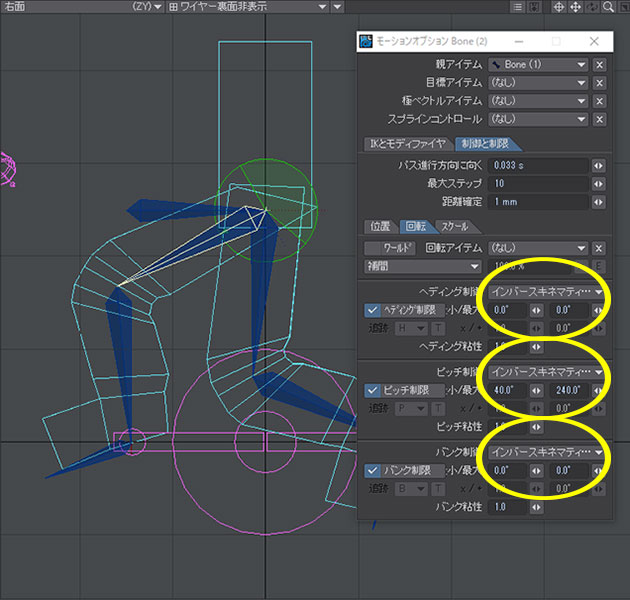
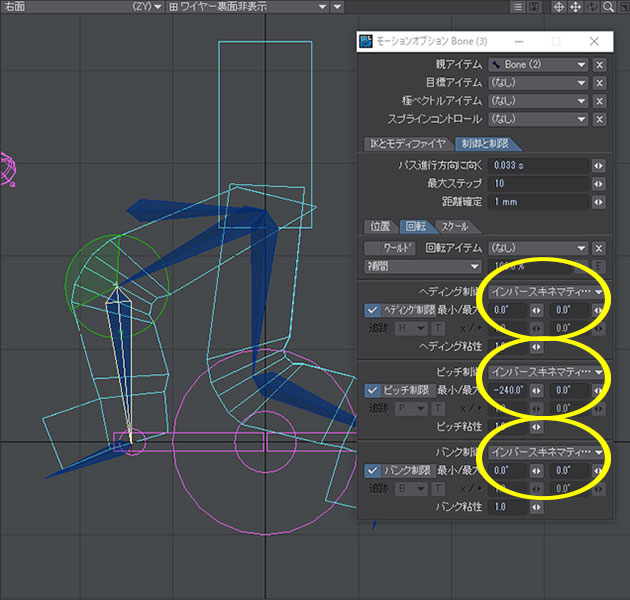
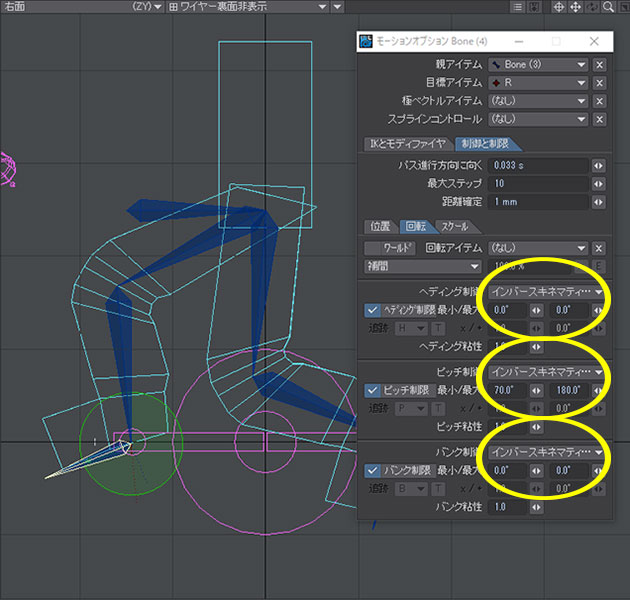
「モーションオプション」内の「制御と制限」タグを開きます。
ます、ヘディング、ピッチ、バンク各回転の「制限」をチェックします。
続いて、ヘディング制御をインバースキネマティクスを選択。
回転方向はピッチ回転しか使わないので、ヘディングとバンクの制限は動かさないため、最小も最大も0を入力します。
ピッチ角度は、膝や足首が逆の方向に折れ曲がらないように、また内側に曲がり過ぎぬように最小値と最大値を入力します。
下の図の数値は、この脚とペダルオブジェにあう数値をピッチ角度に入力しています。参考程度に。
全ての設定を終えたのが、下の図です。
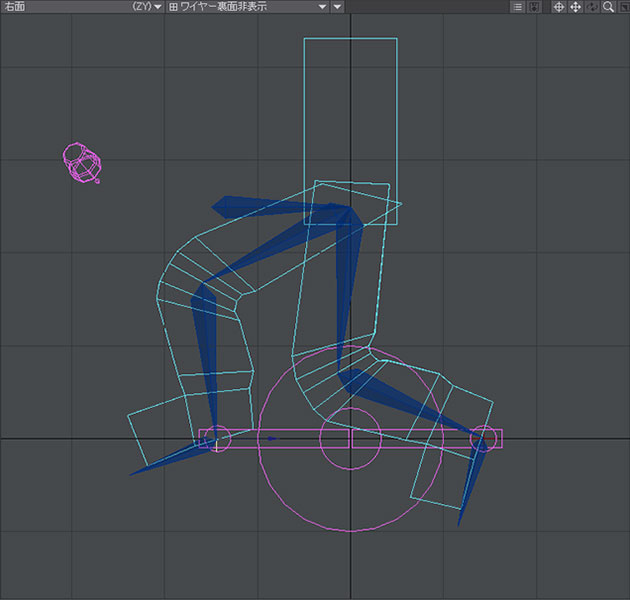
レンダリングして、GIFアニメにしたのがこちらの動画です。
上記の動画は原理を示すためのざっくりしたアニメですが、これらの方法を利用したのが下記の「カタヤキ艦長のライド」のテストアニメです。
以上、自転車のペダルをこぐIK設定でした。
追記:2018年9月13日に公開したアニメでは、このペダリングアニメを全面的に使用しています。